Qingwen Zhang
Ph.D. student, School of Electrical Engineering and Computer Science, KTH

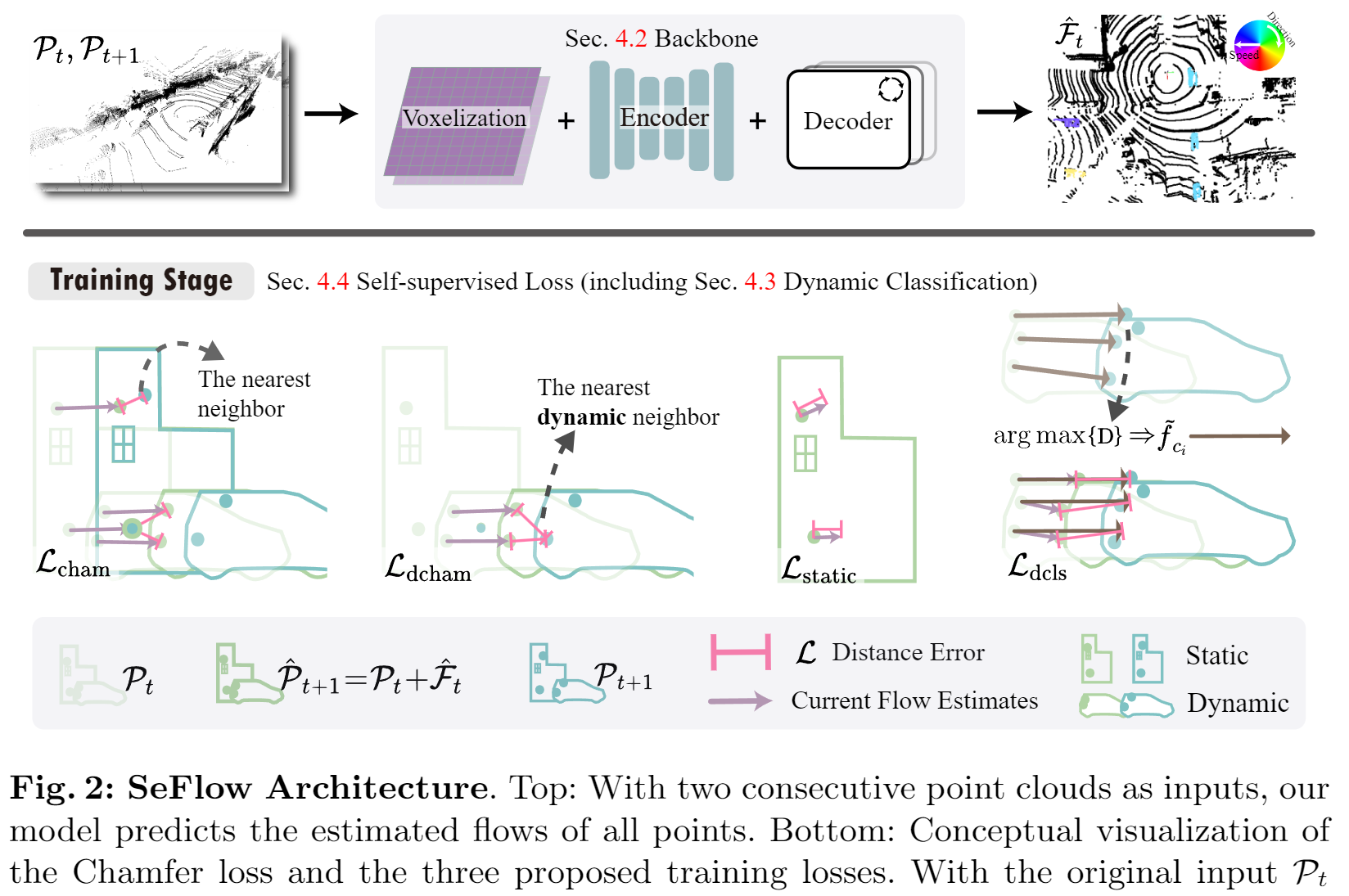
Hi there 👋. Welcome to Qingwen Zhang (张清文) / Kin Zhang (张聪明) Page. I’m a Ph.D. student at the DIVISION OF ROBOTICS, PERCEPTION AND LEARNING at KTH Royal Institute of Technology, supervised by Prof. Patric Jensfelt and Prof. Olov Andersson. My Ph.D. research interests mainly focus on Temporal Modeling of Dynamic 3D Scenes for Self-supervised Scene Flow supported by WASP.
Before that, I graduated with an MPhil from the Robotics Institute RAMLAB of Hong Kong University of Science and Technology, supervised by Prof. Ming Liu and Prof. Wei Zhang. My MPhil research interests mainly include planning and end to end learning in autonomous driving.
I am currently seeking full-time opportunities following my upcoming PhD graduation. Feel free to reach out to me if any job opportunities arise.
news
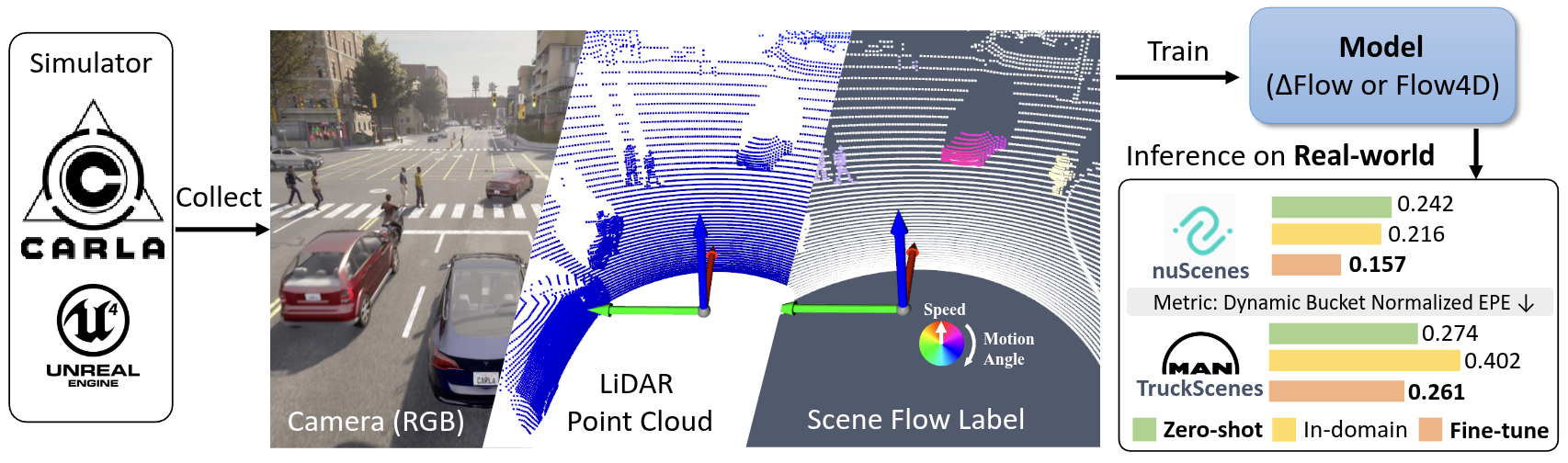
| Jun 21, 2026 | Two papers accepted to ECCV 2026! Check out SynFlow and UniFlow. |
|---|---|
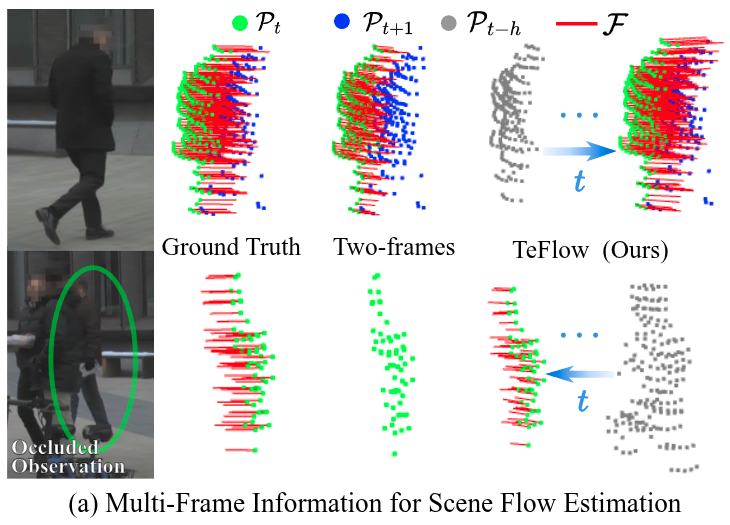
| Feb 23, 2026 | Three papers accepted to CVPR 2026! TeFlow is selected as a highlight, along with FreeScale and GRVS (Findings). |
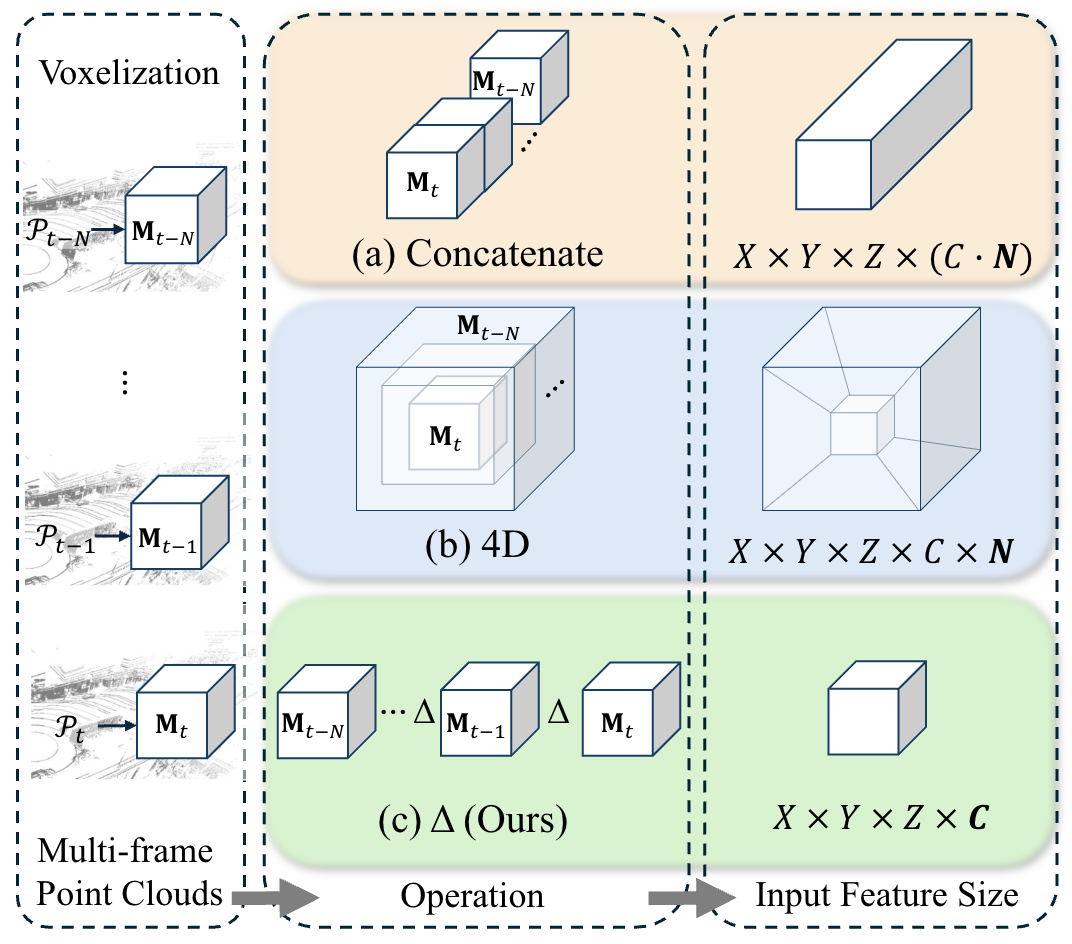
| Sep 18, 2025 | Our DeltaFlow: An Efficient Multi-frame Scene Flow Estimation Method paper is accepted by NeurIPS 2025, and it’s spotlight. ! |
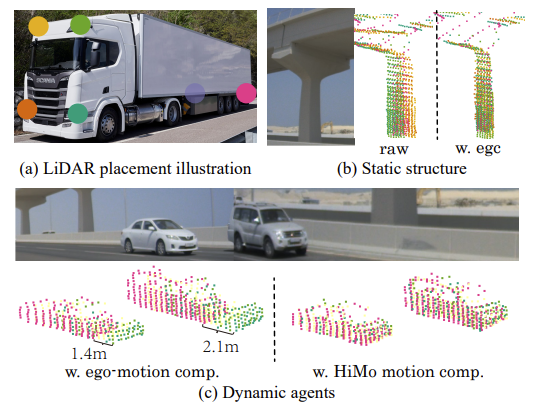
| Aug 20, 2025 | Our HiMo: High-Speed Objects Motion Compensation in Point Clouds paper is accepted by Transactions on Robotics (T-RO). |
selected publications
Check the latest through Google Scholar; * means co-first authors2026
2025
2024
2023
2022
Service
- KTH-RPL GPU Cluster Admin Group Member, Check our cluster-wiki
- Reviewer Service: NeurIPS, ICLR, CVPR, ICCV, ECCV, RA-L, ICRA, IROS
Awards
2019 Outstanding college students and 2017 Outstanding athletes in Tianjin, China