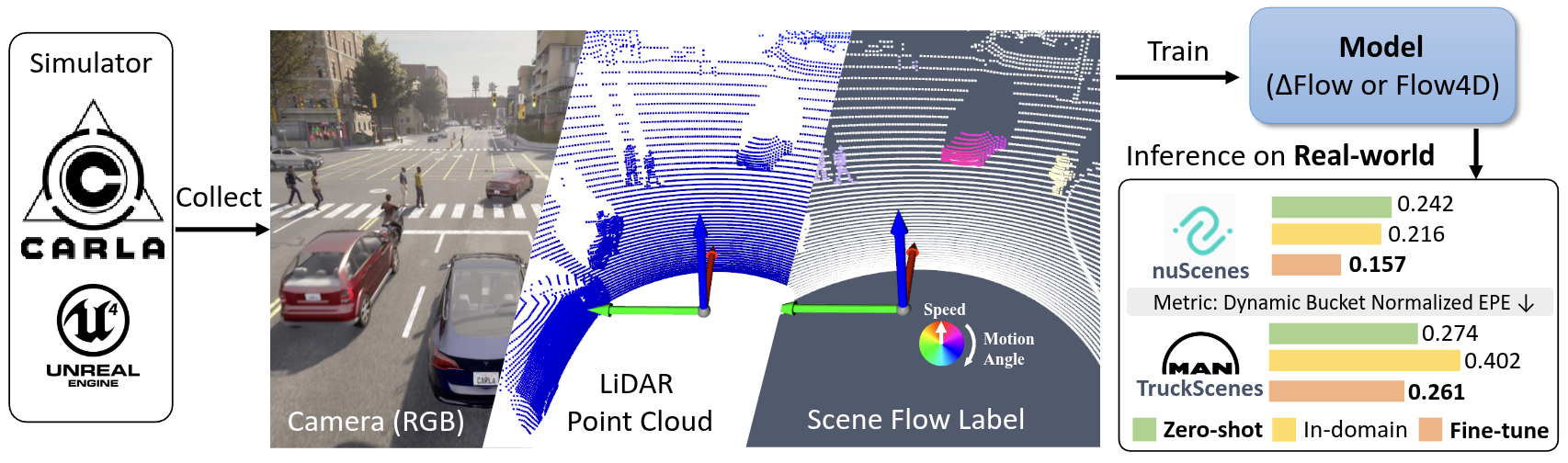
@article{zhang2026synflow,title={{SynFlow}: Scaling Up LiDAR Scene Flow Estimation with Synthetic Data},author={Zhang, Qingwen and Zhu, Xiaomeng and Jiang, Chenhan and Jensfelt, Patric},year={2026},journal={arXiv preprint arXiv:2604.09411},}
CVPR 2026 (Highlight)
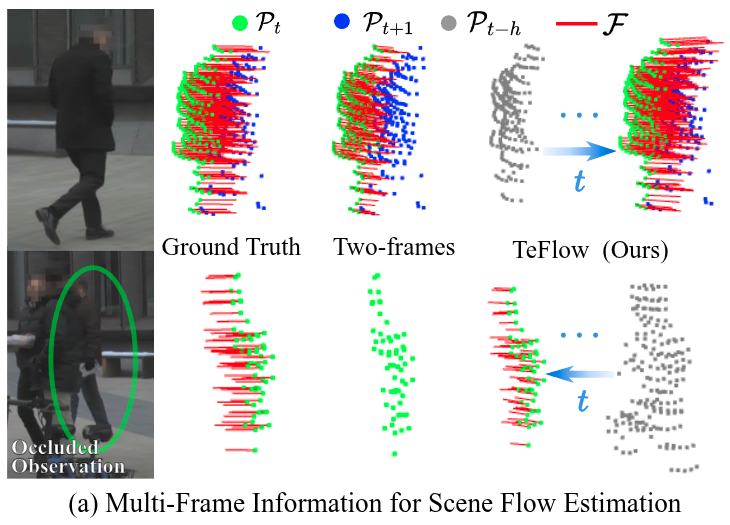
TeFlow: Enabling Multi-frame Supervision for Self-Supervised Feed-forward Scene Flow Estimation
Qingwen Zhang, Chenhan Jiang, Xiaomeng Zhu, Yunqi Miao, Yushan Zhang, and 2 more authors
In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2026
@inproceedings{zhang2026teflow,title={{TeFlow}: Enabling Multi-frame Supervision for Self-Supervised Feed-forward Scene Flow Estimation},author={Zhang, Qingwen and Jiang, Chenhan and Zhu, Xiaomeng and Miao, Yunqi and Zhang, Yushan and Andersson, Olov and Jensfelt, Patric},year={2026},booktitle={Proceedings of the IEEE/CVF conference on computer vision and pattern recognition},pages={3667-3676},}
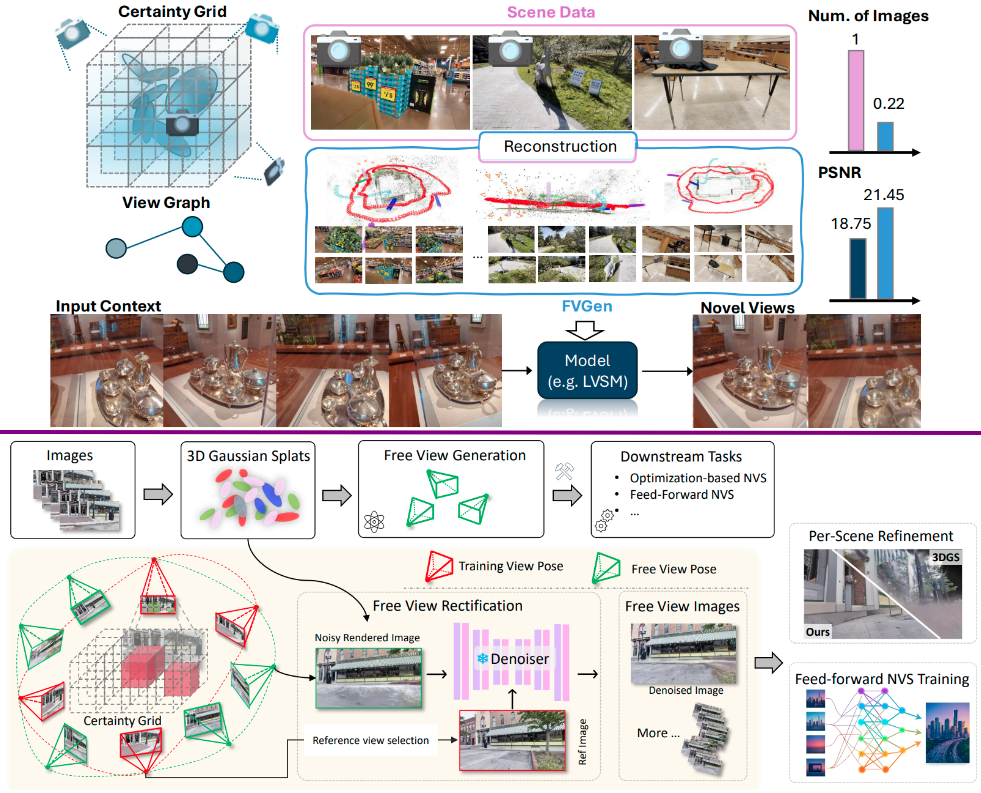
@inproceedings{jiang2026freescale,title={{FreeScale}: Scaling 3D scenes via Certainty-Aware Free-View Generation},author={Jiang, Chenhan and Chen, Yu and Zhang, Qingwen and Song, Jifei and Xu, Songcen and Yeung, Dit-Yan and Deng, Jiankang},year={2026},booktitle={Proceedings of the IEEE/CVF conference on computer vision and pattern recognition},pages={330-340},}
ECCV 2026
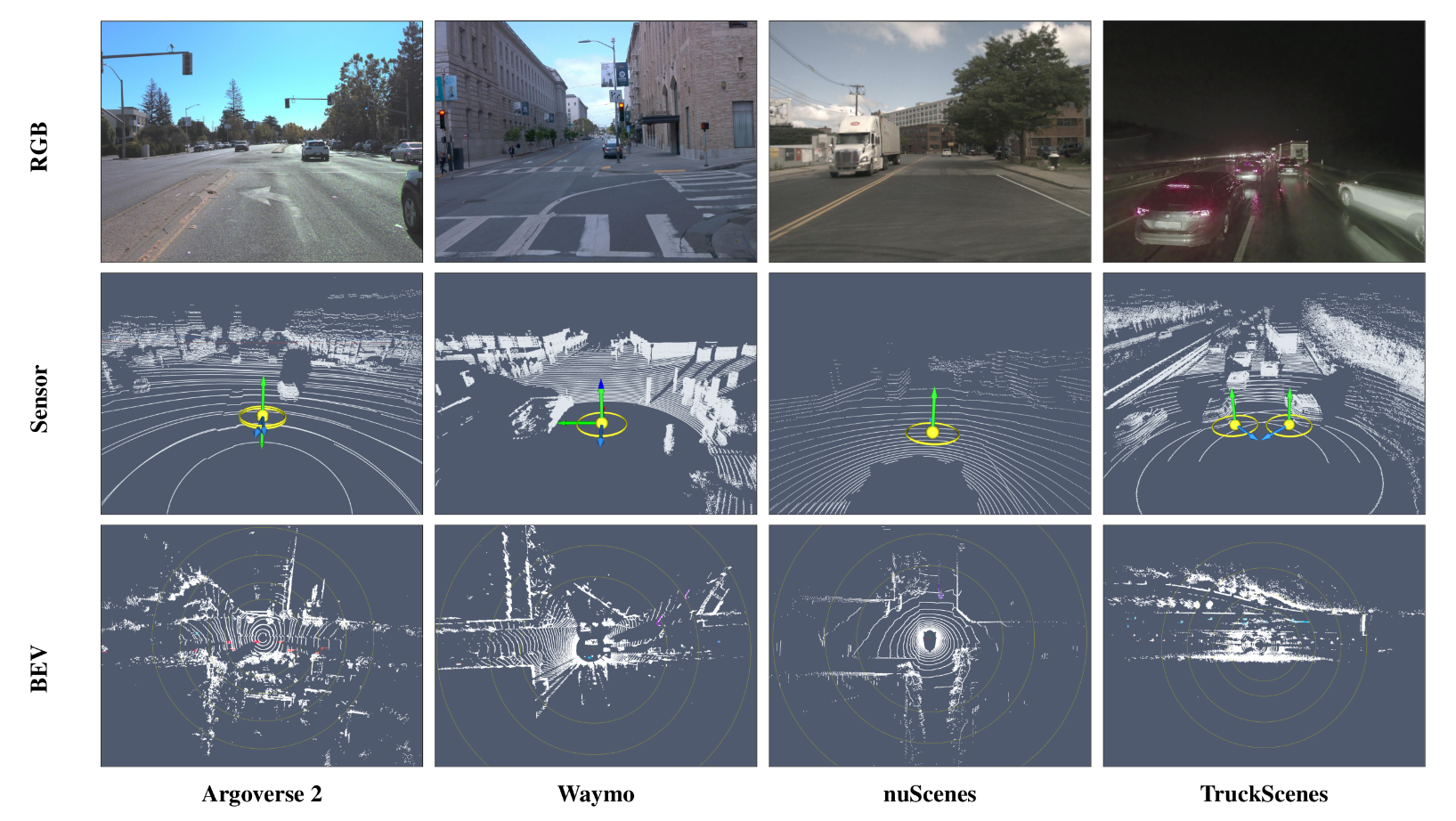
UniFlow: Zero-Shot LiDAR Scene Flow for Autonomous Vehicles
Siyi Li, Qingwen Zhang, Ishan Khatri, Kyle Vedder, Eric Eaton, and 2 more authors
@article{li2025uniflowzeroshotlidarscene,title={UniFlow: Zero-Shot LiDAR Scene Flow for Autonomous Vehicles},author={Li, Siyi and Zhang, Qingwen and Khatri, Ishan and Vedder, Kyle and Eaton, Eric and Ramanan, Deva and Peri, Neehar},year={2026},journal={arXiv preprint arXiv:2511.18254},}
CVPR 2026 Findings
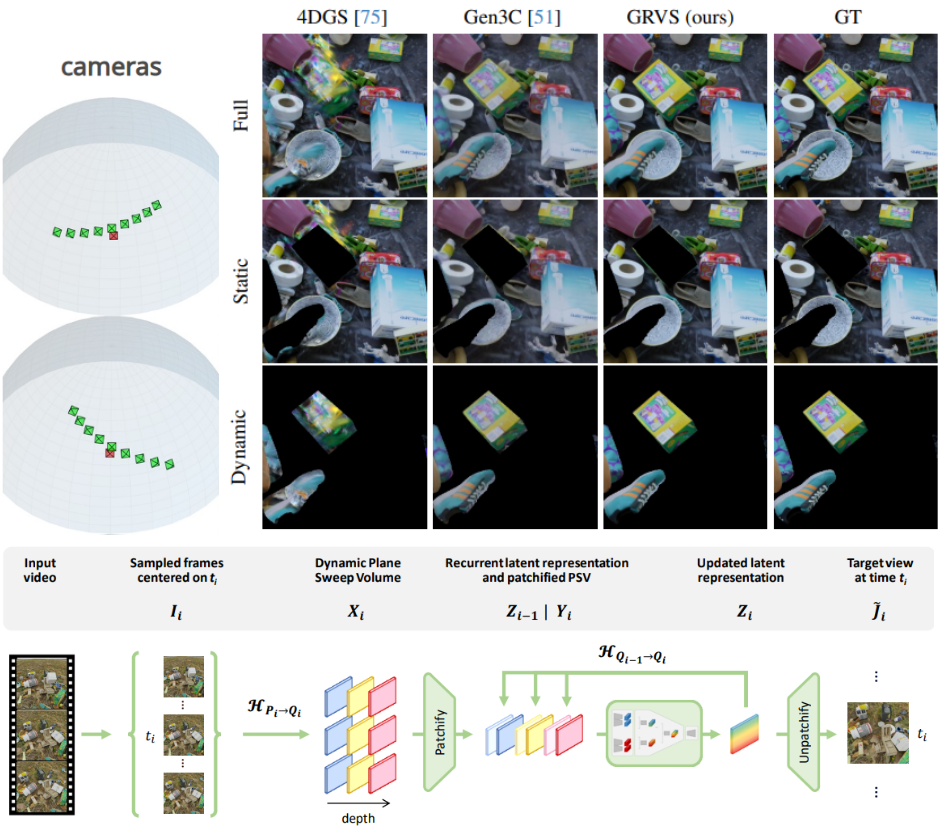
GRVS: a Generalizable and Recurrent Approach to Monocular Dynamic View Synthesis
Thomas Tanay, Mohammed Brahimi, Michal Nazarczuk, Qingwen Zhang, Sibi Catley-Chandar, and 3 more authors
In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition Findings, 2026
@inproceedings{tanay2026grvs,title={{GRVS}: a Generalizable and Recurrent Approach to Monocular Dynamic View Synthesis},author={Tanay, Thomas and Brahimi, Mohammed and Nazarczuk, Michal and Zhang, Qingwen and Catley-Chandar, Sibi and Moreau, Arthur and Zhang, Zhensong and P{\'e}rez-Pellitero, Eduardo},year={2026},booktitle={Proceedings of the IEEE/CVF conference on computer vision and pattern recognition Findings},pages={},}
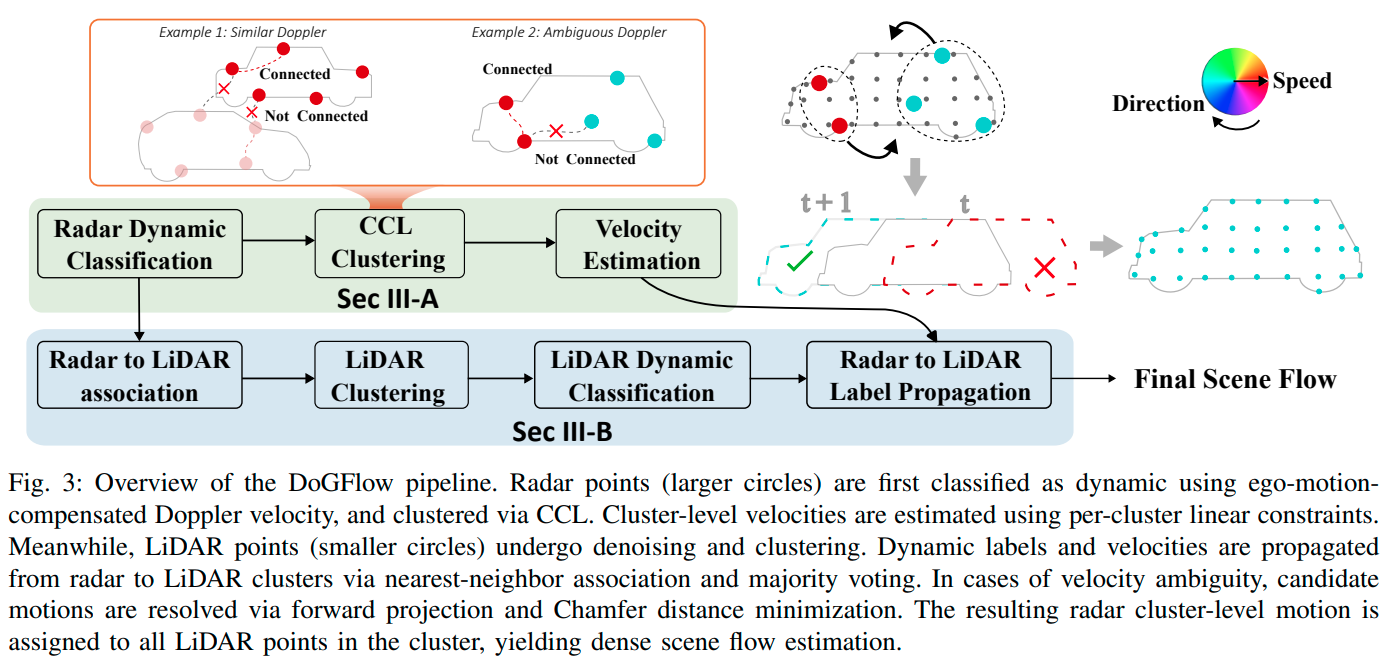
@article{khoche2026dogflow,author={Khoche, Ajinkya and Zhang, Qingwen and Cai, Yixi and Mansouri, Sina Sharif and Jensfelt, Patric},journal={IEEE Robotics and Automation Letters},title={{DoGFlow}: Self-Supervised LiDAR Scene Flow via Cross-Modal Doppler Guidance},year={2026},volume={11},number={3},pages={3836-3843},doi={10.1109/LRA.2026.3662592},}
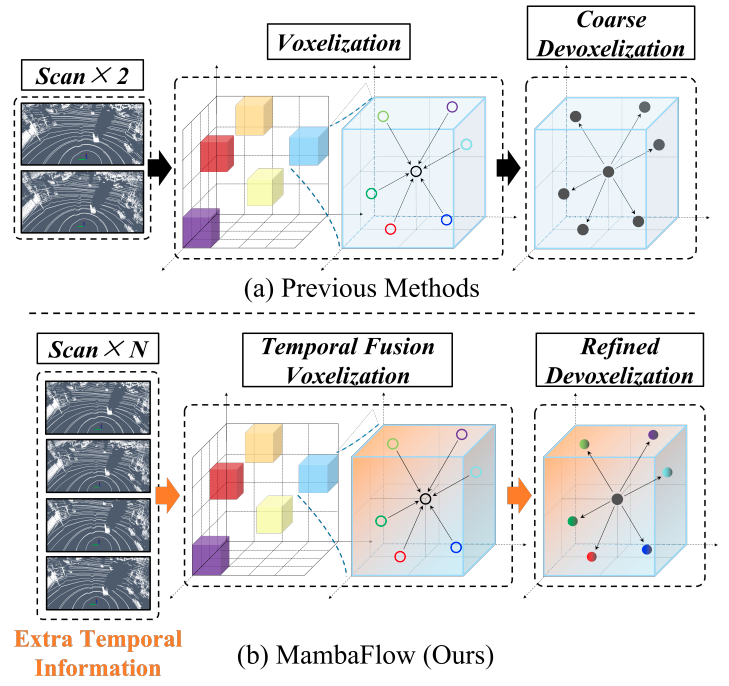
@article{luo2026mambaflow,author={Luo, Jiehao and Cheng, Jintao and Zhang, Qingwen and Xue, Bohuan and Fan, Rui and Tang, Xiaoyu},journal={IEEE Transactions on Intelligent Vehicles},title={{MambaFlow}: A Novel and Flow-Guided State Space Model for Scene Flow Estimation},year={2026},volume={11},number={4},pages={511-521},doi={10.1109/TIV.2026.3663171},}
2025
NeurIPS 2025 (Spotlight)
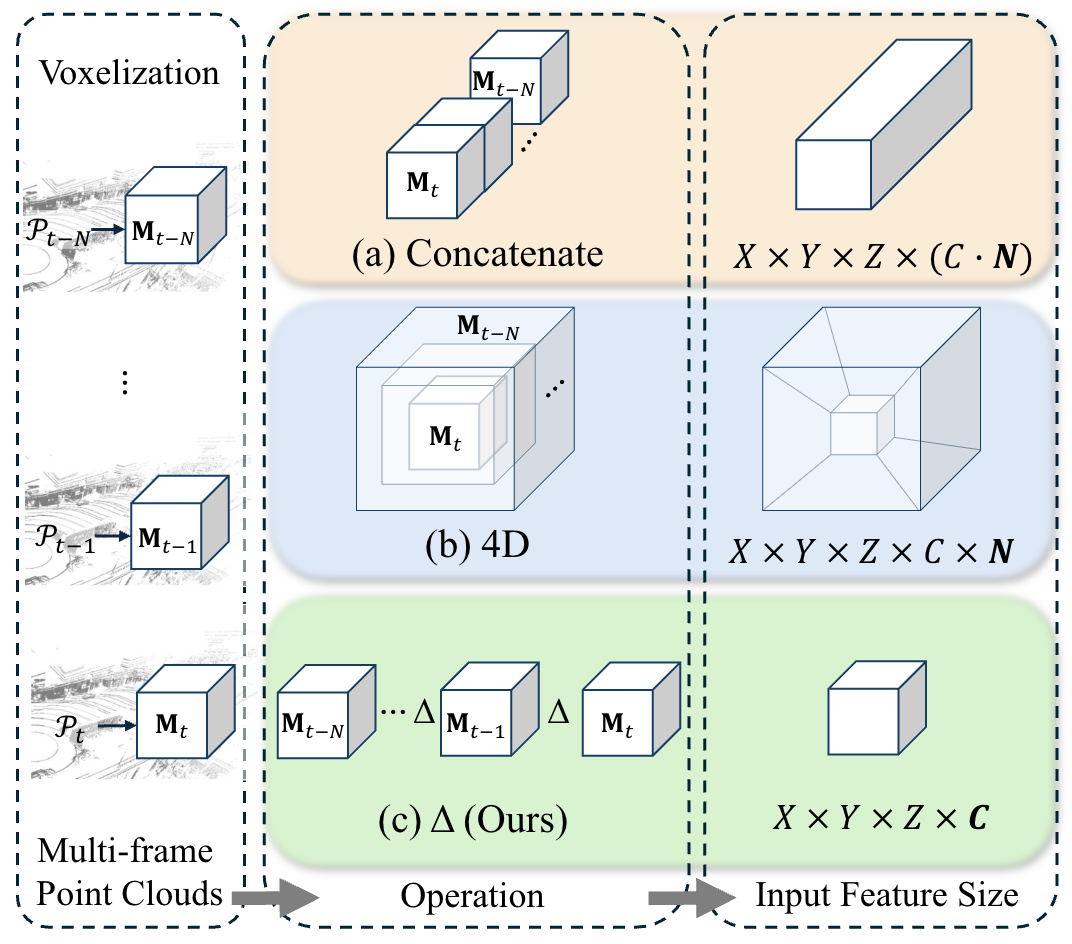
DeltaFlow: An Efficient Multi-frame Scene Flow Estimation Method
@inproceedings{zhang2025deltaflow,title={{DeltaFlow}: An Efficient Multi-frame Scene Flow Estimation Method},author={Zhang, Qingwen and Zhu, Xiaomeng and Zhang, Yushan and Cai, Yixi and Andersson, Olov and Jensfelt, Patric},year={2025},booktitle={The Thirty-ninth Annual Conference on Neural Information Processing Systems},url={https://openreview.net/forum?id=T9qNDtvAJX},}
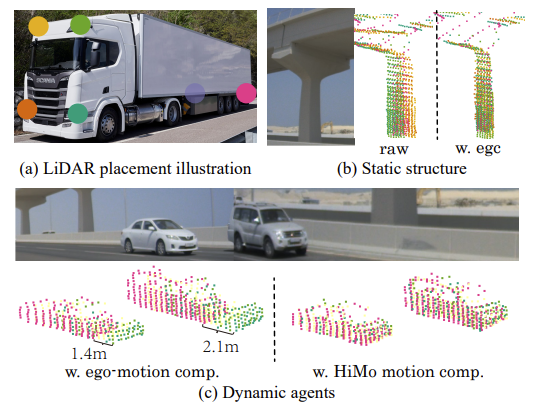
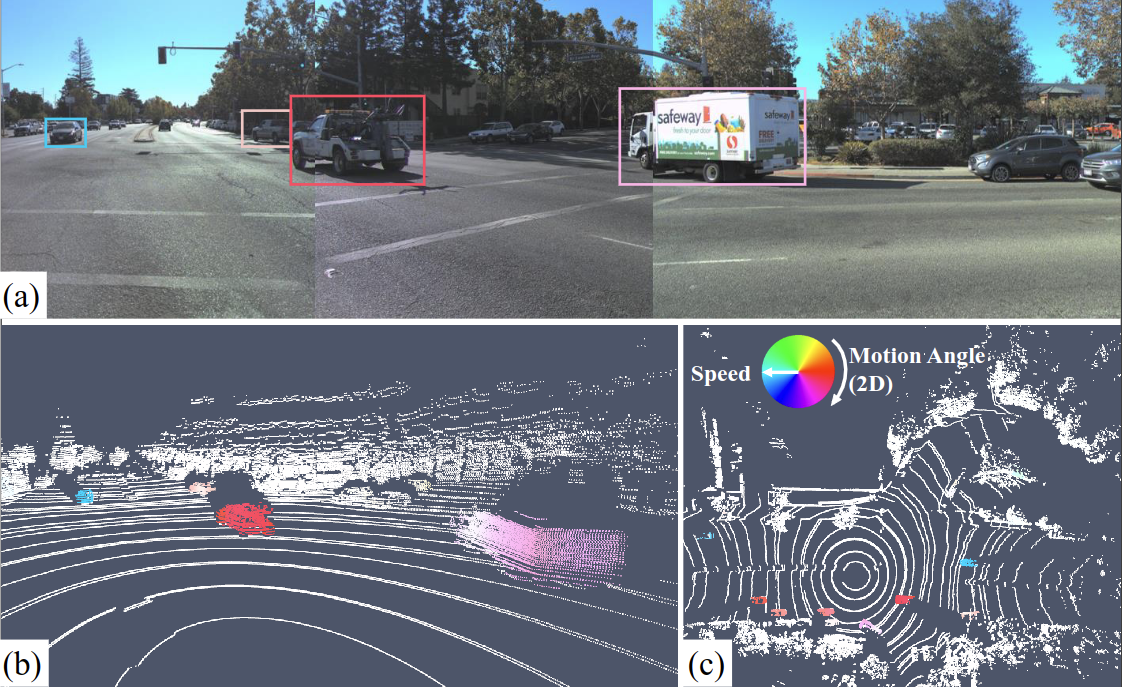
@article{zhang2025himo,title={{HiMo}: High-Speed Objects Motion Compensation in Point Clouds},author={Zhang, Qingwen and Khoche, Ajinkya and Yang, Yi and Ling, Li and Mansouri, Sina Sharif and Andersson, Olov and Jensfelt, Patric},journal={IEEE Transactions on Robotics},year={2025},volume={41},pages={5896-5911},doi={10.1109/TRO.2025.3619042},}
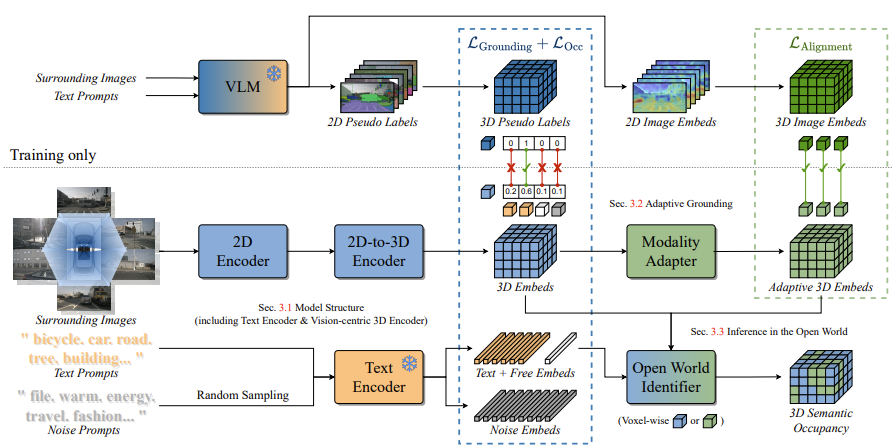
@article{li2025ago,author={Li, Peizheng and Ding, Shuxiao and Zhou, You and Zhang, Qingwen and Inak, Onat and Triess, Larissa and Hanselmann, Niklas and Cordts, Marius and Zell, Andreas},booktitle={2025 IEEE/CVF International Conference on Computer Vision (ICCV)},title={AGO: Adaptive Grounding for Open World 3D Occupancy Prediction},pages={8645-8655},doi={10.1109/ICCV51701.2025.00809},year={2025},}
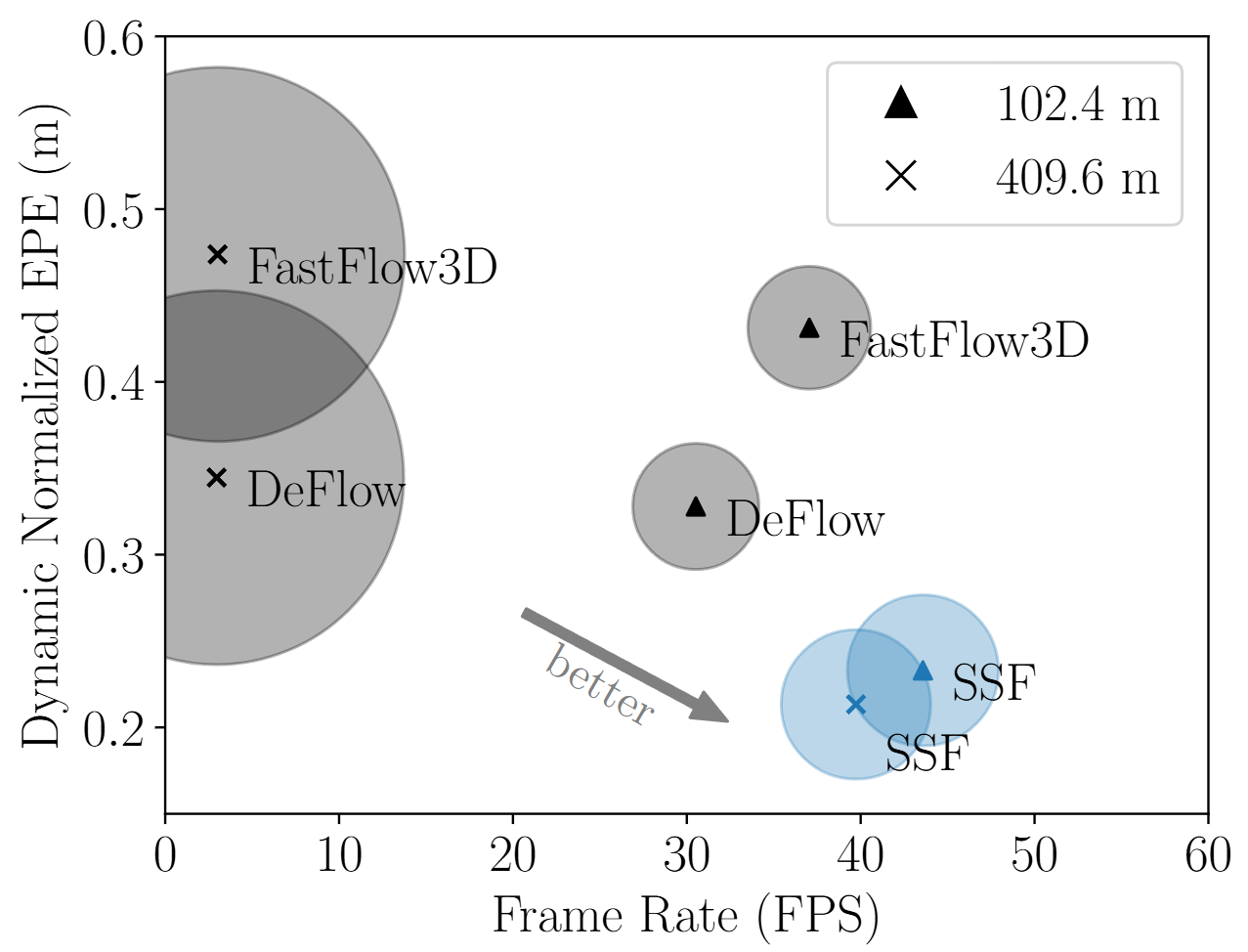
@inproceedings{khoche2025ssf,author={Khoche, Ajinkya and Zhang, Qingwen and Sanchez, Laura Pereira and Asefaw, Aron and Mansouri, Sina Sharif and Jensfelt, Patric},title={{SSF}: Sparse Long-Range Scene Flow for Autonomous Driving},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},year={2025},pages={6394-6400},doi={10.1109/ICRA55743.2025.11128770},}
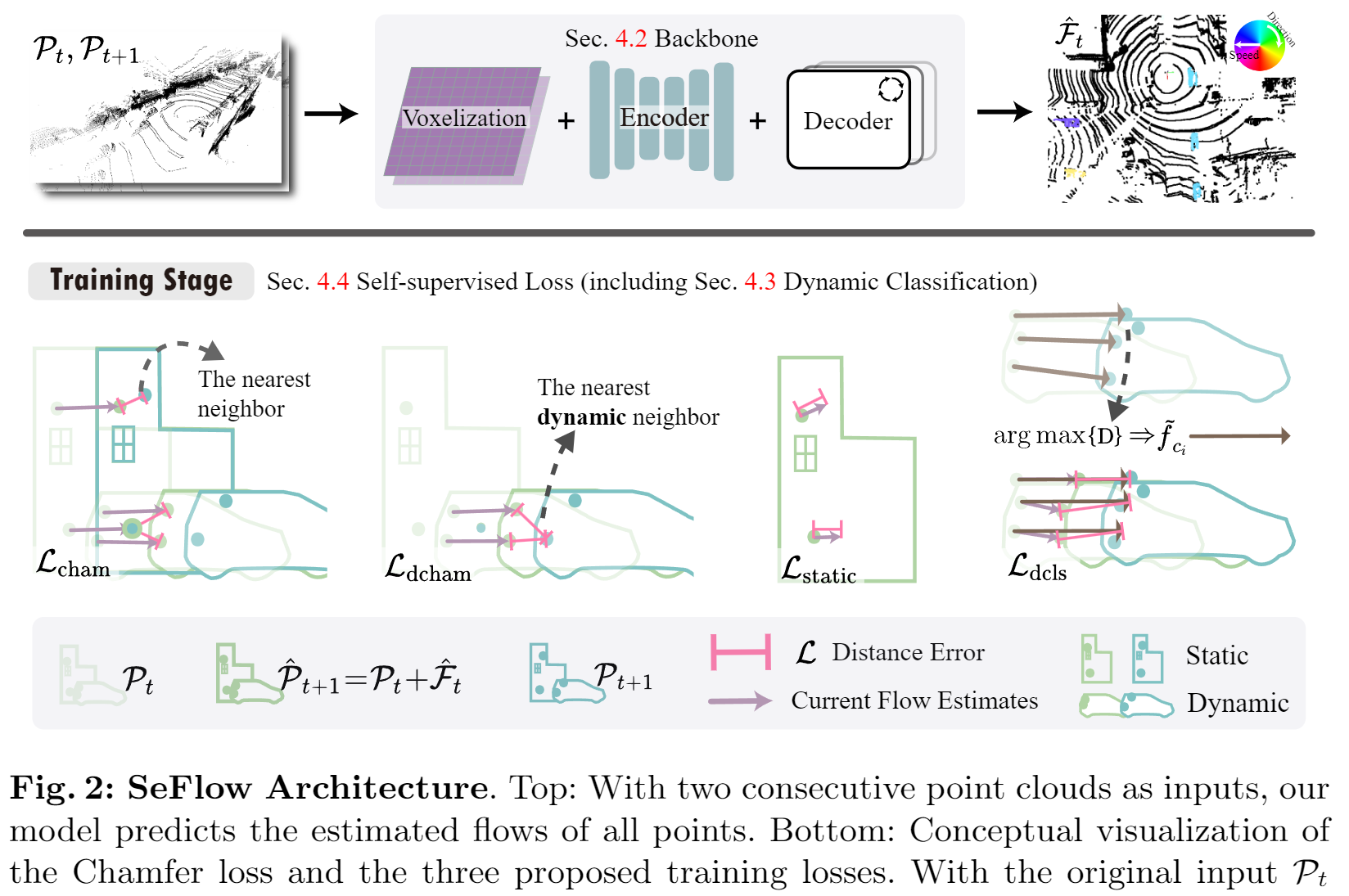
@inproceedings{zhang2024seflow,author={Zhang, Qingwen and Yang, Yi and Li, Peizheng and Andersson, Olov and Jensfelt, Patric},title={{SeFlow}: A Self-Supervised Scene Flow Method in Autonomous Driving},booktitle={European Conference on Computer Vision (ECCV)},year={2024},pages={353–369},organization={Springer},doi={10.1007/978-3-031-73232-4_20},}
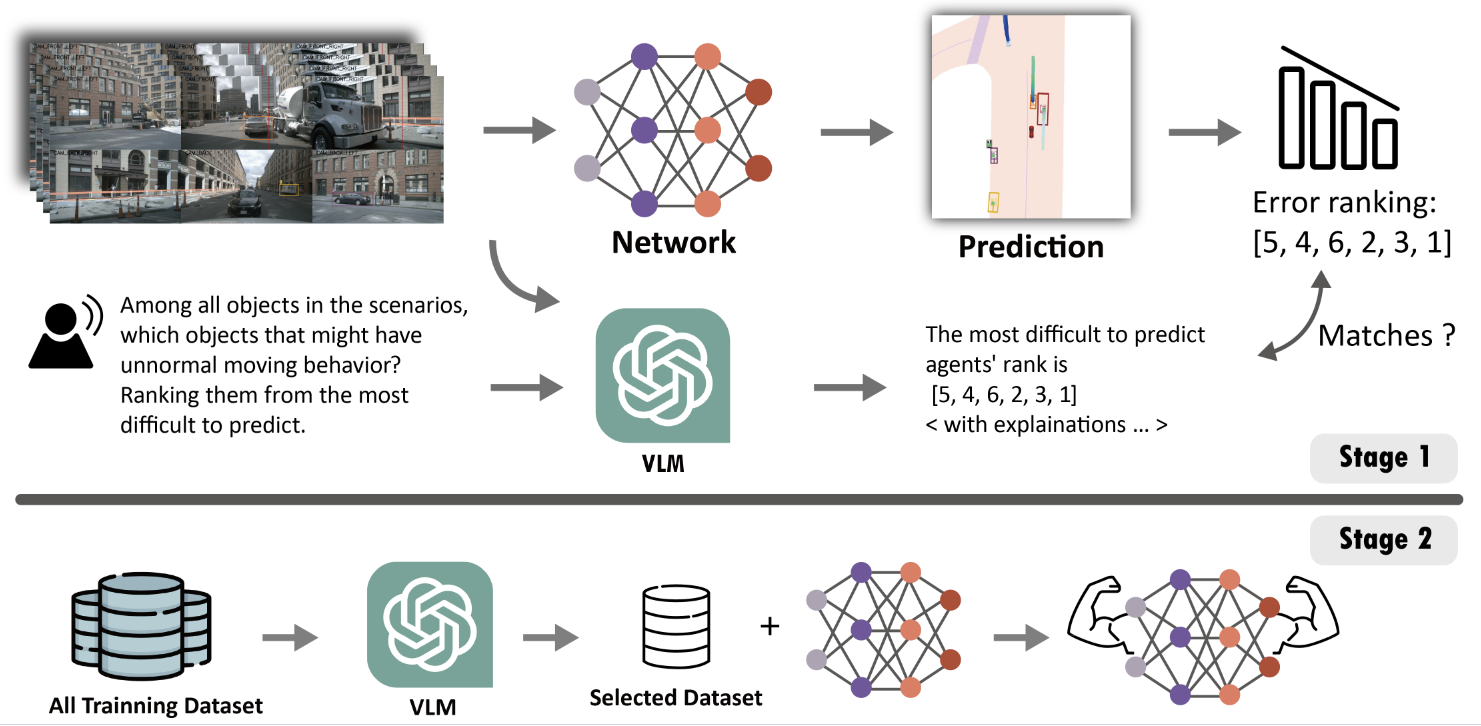
@inproceedings{yang2024hard,author={Yang, Yi and Zhang, Qingwen and Ikemura, Kei and Batool, Nazre and Folkesson, John},booktitle={2024 IEEE Intelligent Vehicles Symposium (IV)},title={Hard Cases Detection in Motion Prediction by Vision-Language Foundation Models},year={2024},pages={2405-2412},}
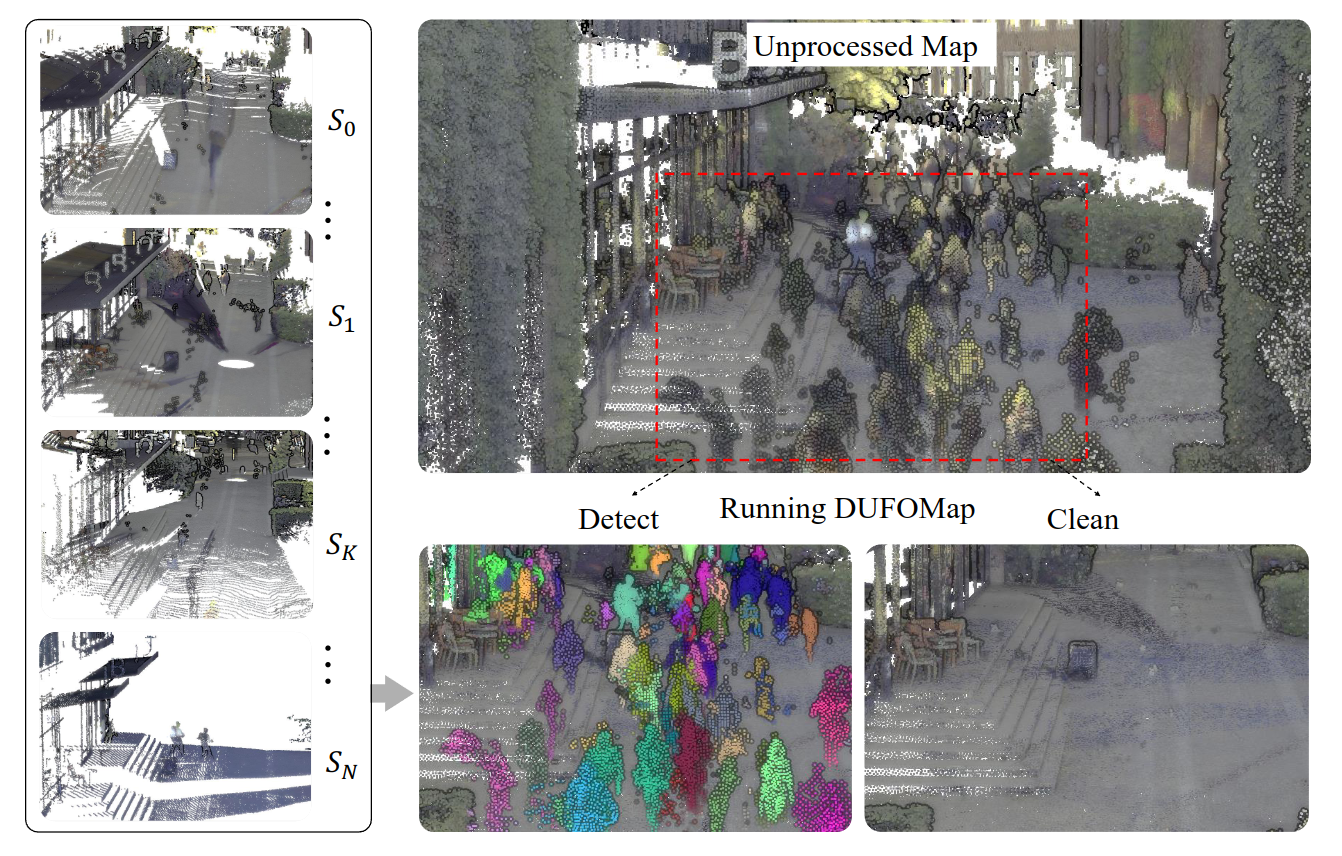
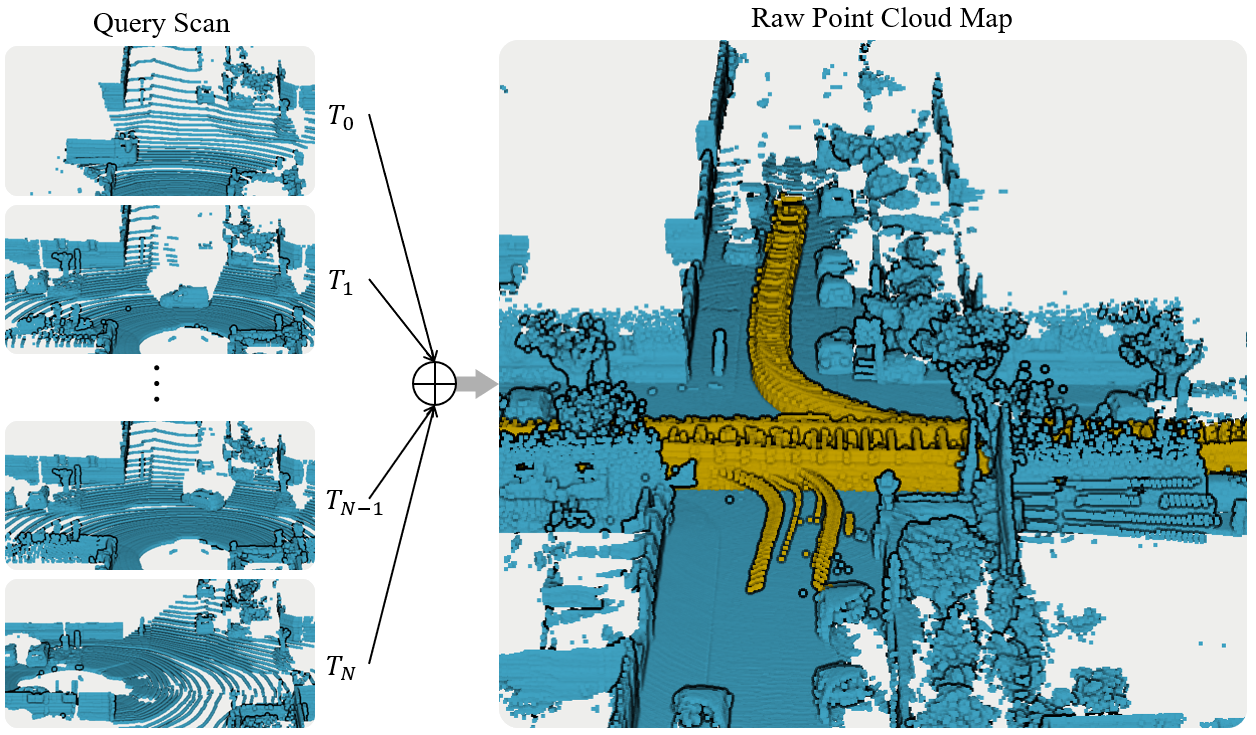
@article{daniel2024dufomap,author={Duberg, Daniel and Zhang, Qingwen and Jia, MingKai and Jensfelt, Patric},journal={IEEE Robotics and Automation Letters},title={{DUFOMap}: Efficient Dynamic Awareness Mapping},year={2024},volume={9},number={6},pages={5038-5045},doi={10.1109/LRA.2024.3387658},}
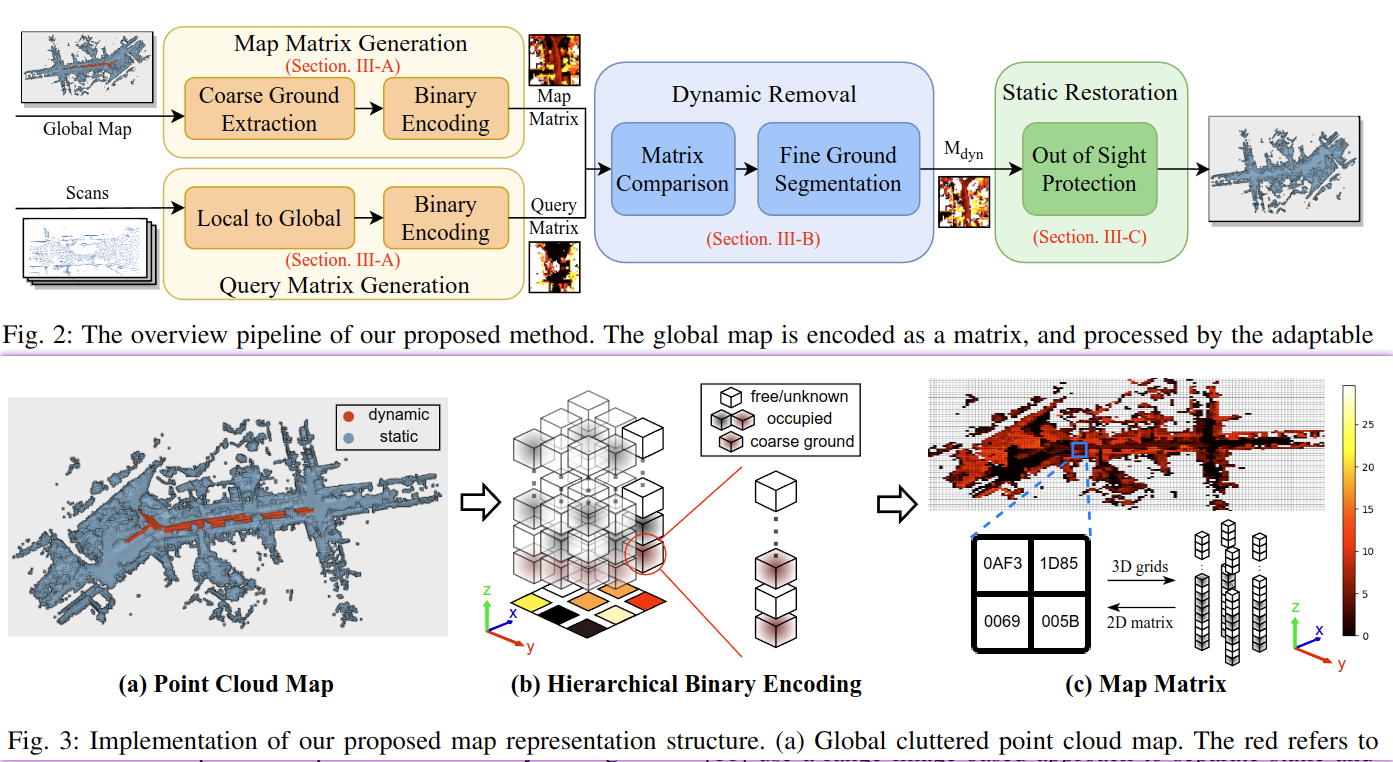
@article{jia2024beautymap,author={Jia, Mingkai and Zhang, Qingwen and Yang, Bowen and Wu, Jin and Liu, Ming and Jensfelt, Patric},journal={IEEE Robotics and Automation Letters},title={{BeautyMap}: Binary-Encoded Adaptable Ground Matrix for Dynamic Points Removal in Global Maps},year={2024},volume={9},number={7},pages={6256-6263},doi={10.1109/LRA.2024.3402625},}
@inproceedings{zhang2024deflow,author={Zhang, Qingwen and Yang, Yi and Fang, Heng and Geng, Ruoyu and Jensfelt, Patric},booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},title={{DeFlow}: Decoder of Scene Flow Network in Autonomous Driving},year={2024},pages={2105-2111},doi={10.1109/ICRA57147.2024.10610278},}
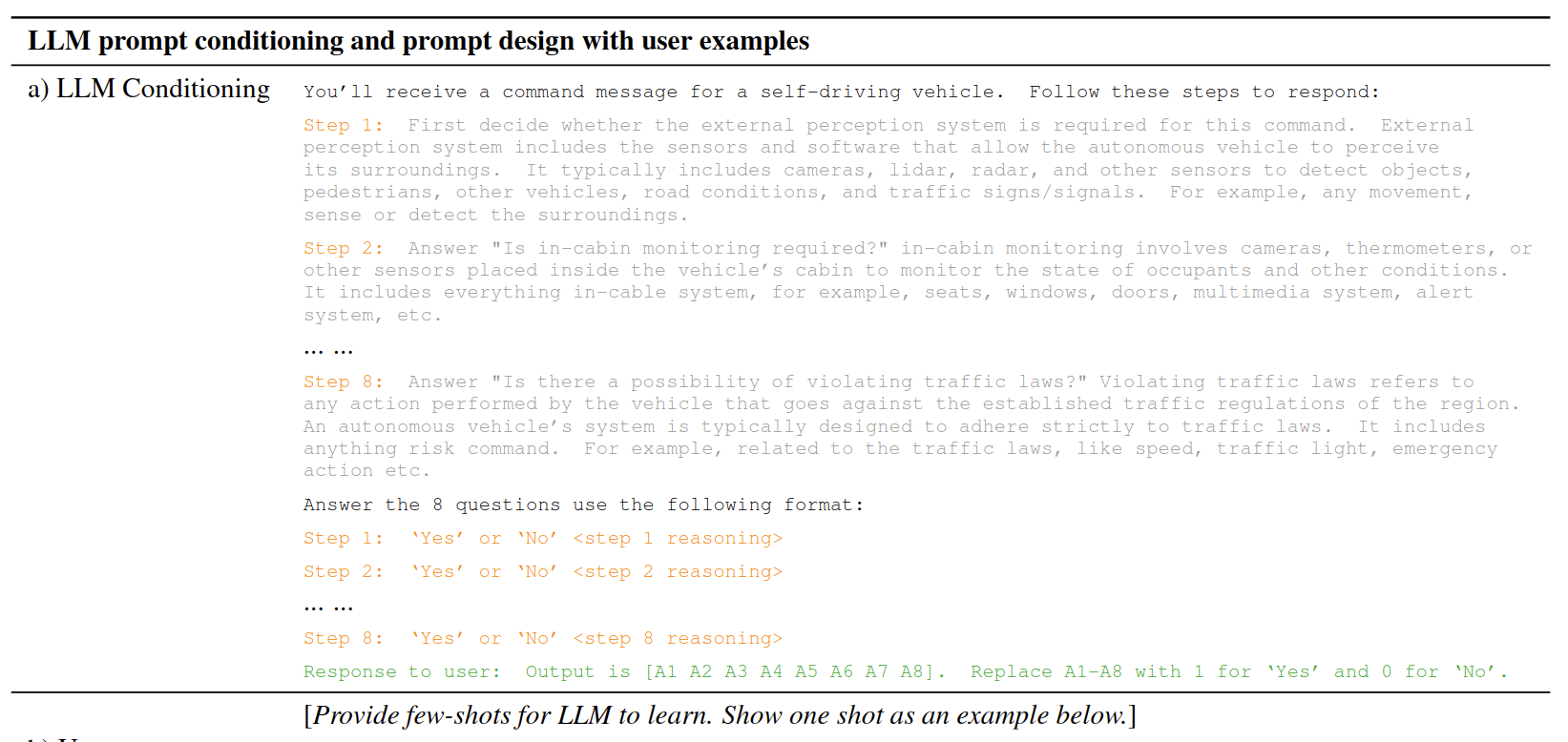
@inproceedings{yang2023drivecmd,badge={WACV 2024 Workshop},title={Human-centric autonomous systems with llms for user command reasoning},author={Yang, Yi and Zhang, Qingwen and Li, Ci and Marta, Daniel Sim{\~o}es and Batool, Nazre and Folkesson, John},booktitle={Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision},pages={988--994},year={2024},}
@inproceedings{zhang2023benchmark,author={Zhang, Qingwen and Duberg, Daniel and Geng, Ruoyu and Jia, Mingkai and Wang, Lujia and Jensfelt, Patric},booktitle={IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)},title={A Dynamic Points Removal Benchmark in Point Cloud Maps},year={2023},pages={608-614},doi={10.1109/ITSC57777.2023.10422094},}
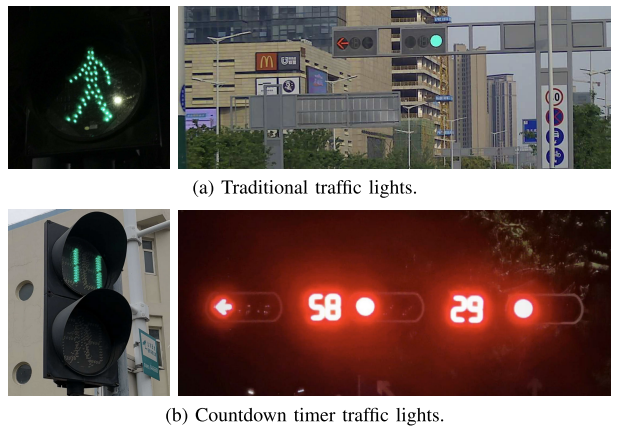
@inproceedings{zhang2023vthmm,author={Zhang, Shuyang and Zhang, Qingwen and Chen, Feiyi and Wu, Jin and Jiao, Jianhao and Wang, Lujia},booktitle={IEEE Transactions on Intelligent Transportation Systems},year={2023},volume={24},number={9},pages={9449-9461},doi={10.1109/TITS.2023.3265985},title={A VT-HMM-Based Framework for Countdown Timer Traffic Light State Estimation},journal={arXiv preprint arXiv:2307.07260},}
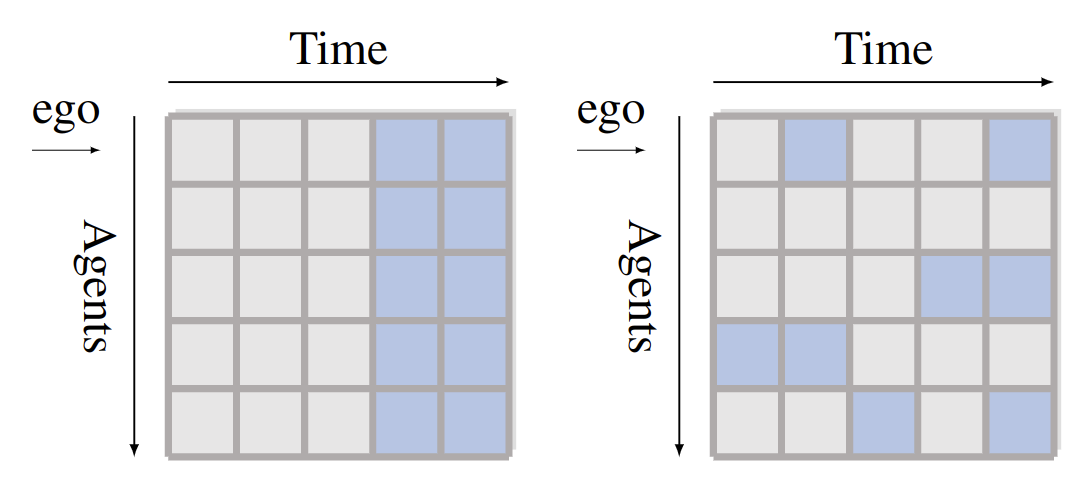
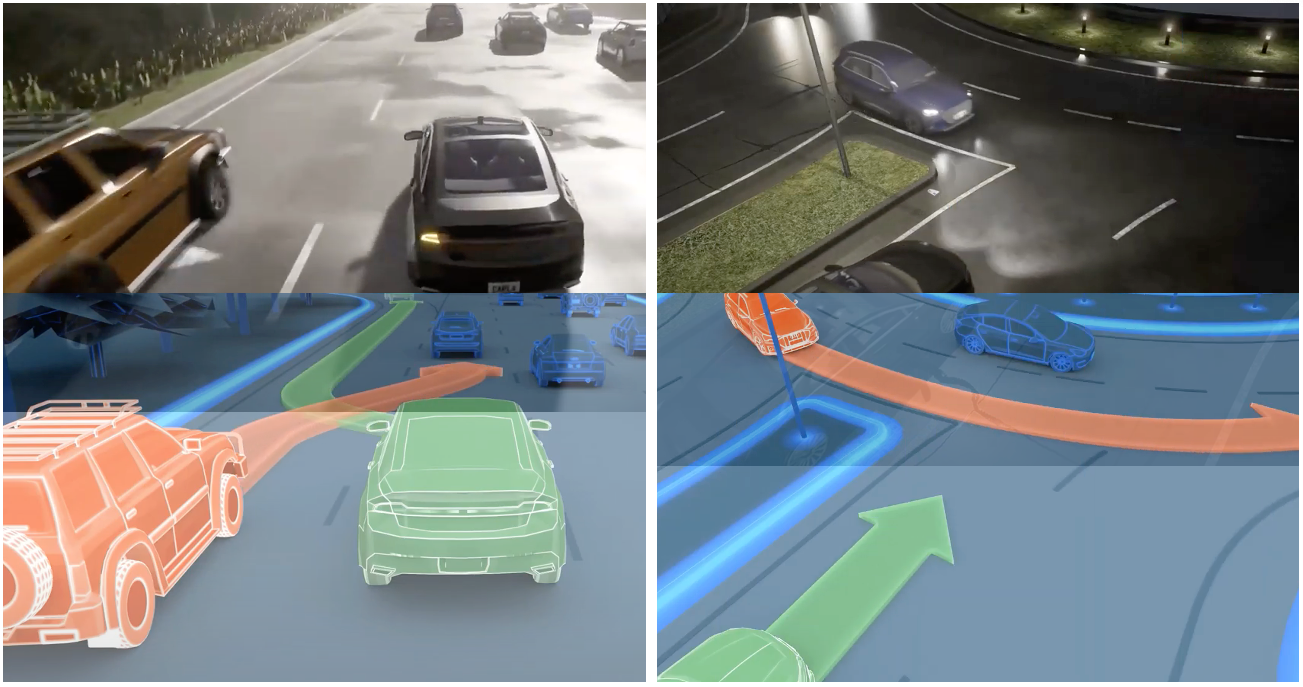
@inproceedings{yang2023rmp,author={Yang, Yi and Zhang, Qingwen and Gilles, Thomas and Batool, Nazre and Folkesson, John},booktitle={IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)},title={{RMP}: A Random Mask Pretrain Framework for Motion Prediction},year={2023},volume={},number={},pages={3717-3723},doi={10.1109/ITSC57777.2023.10422522},}
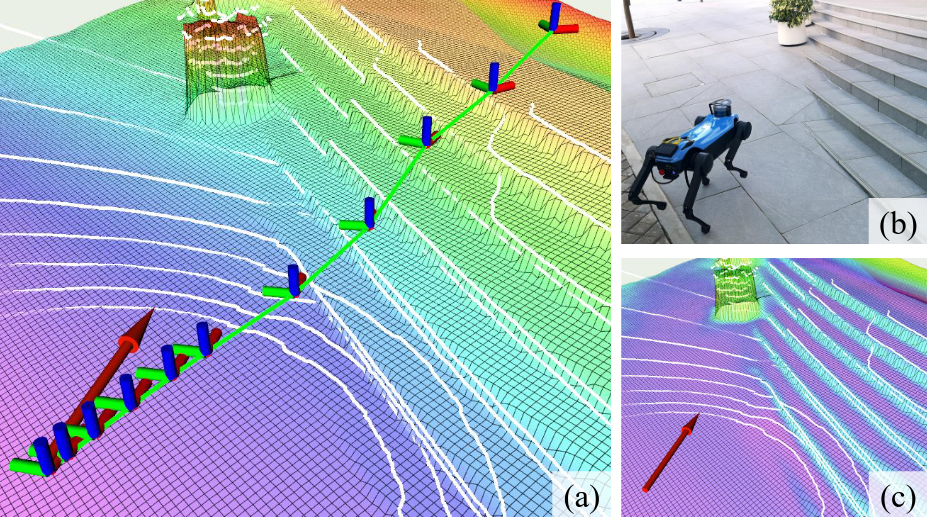
@article{yang2023ndem,author={Yang, Bowen and Zhang, Qingwen and Geng, Ruoyu and Wang, Lujia and Liu, Ming},journal={IEEE Robotics and Automation Letters},title={Real-Time Neural Dense Elevation Mapping for Urban Terrain With Uncertainty Estimations},year={2023},volume={8},number={2},pages={696-703},doi={10.1109/LRA.2022.3230325},}
@inproceedings{zhang2022mmfn,title={{MMFN}: Multi-Modal-Fusion-Net for End-to-End Driving},author={Zhang, Qingwen and Tang, Mingkai and Geng, Ruoyu and Chen, Feiyi and Xin, Ren and Wang, Lujia},booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},pages={8638--8643},year={2022},organization={IEEE},}
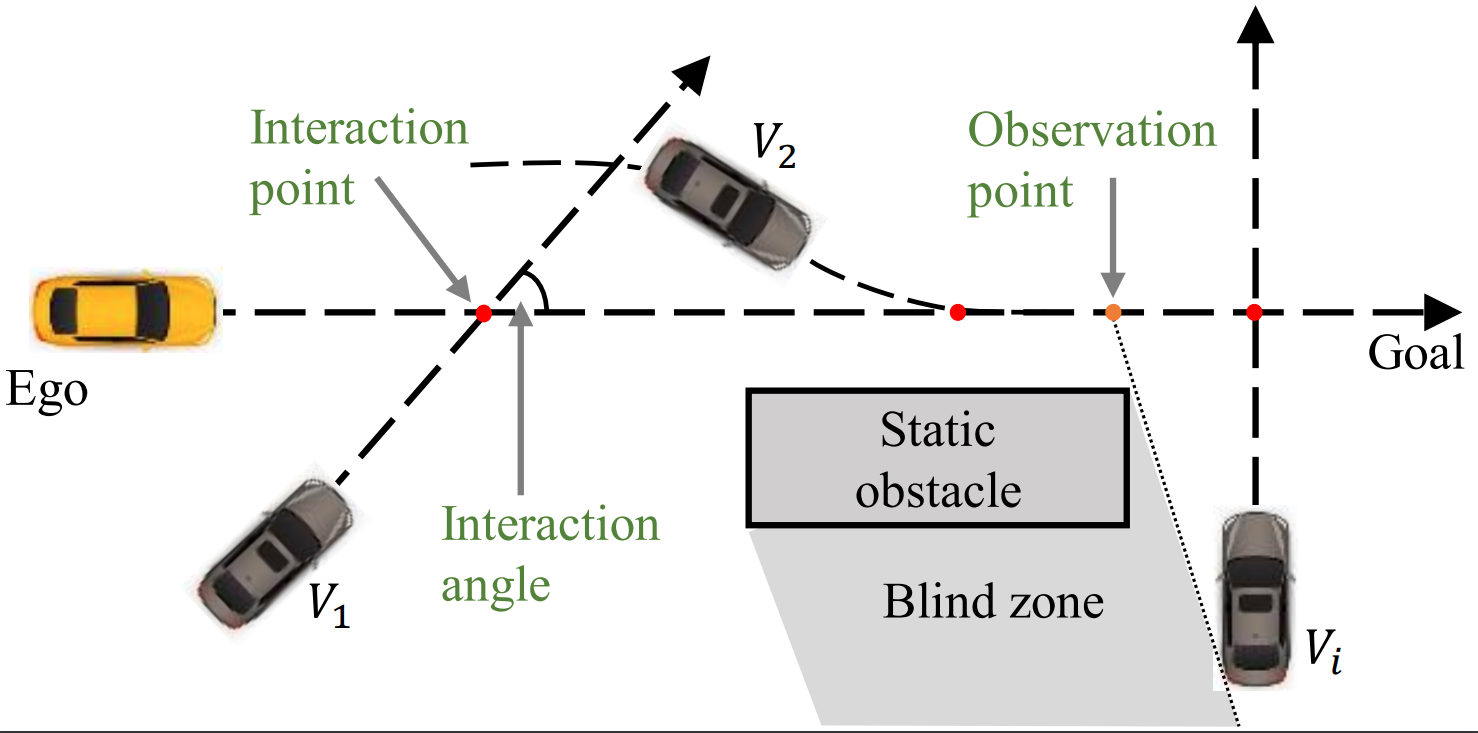
@article{chen2022ipm,author={Chen, Yingbing and Xin, Ren and Cheng, Jie and Zhang, Qingwen and Mei, Xiaodong and Liu, Ming and Wang, Lujia},journal={IEEE Robotics and Automation Letters},title={Efficient Speed Planning for Autonomous Driving in Dynamic Environment With Interaction Point Model},year={2022},volume={7},number={4},pages={11839-11846},doi={10.1109/LRA.2022.3207555},}
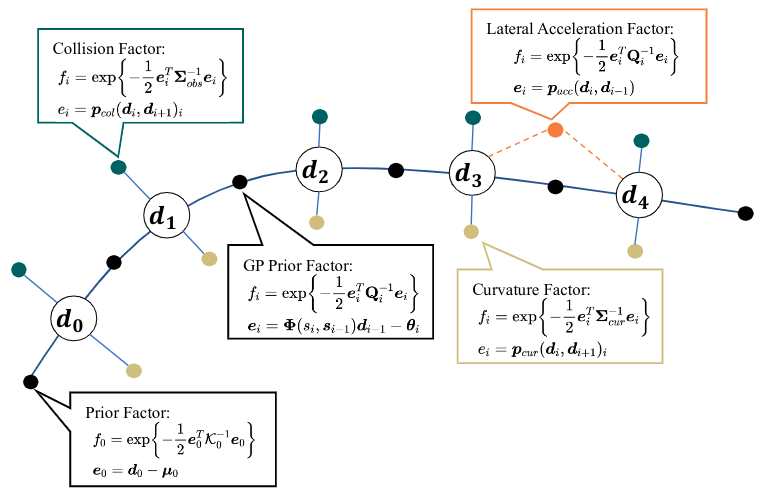
@inproceedings{cheng2022real,title={Real-time trajectory planning for autonomous driving with gaussian process and incremental refinement},author={Cheng, Jie and Chen, Yingbing and Zhang, Qingwen and Gan, Lu and Liu, Chengju and Liu, Ming},booktitle={International Conference on Robotics and Automation (ICRA)},pages={8999--9005},year={2022},organization={IEEE},}
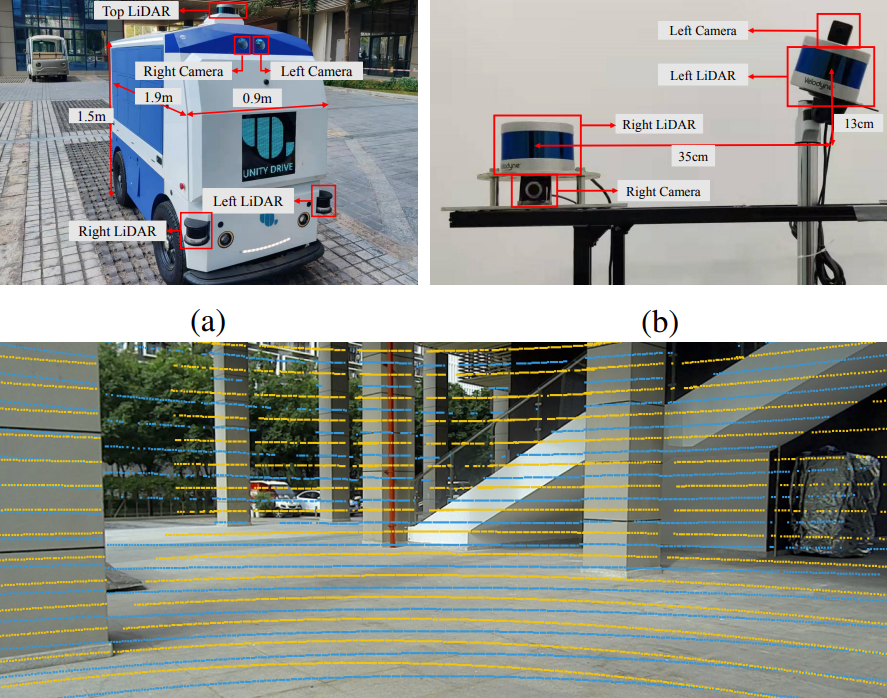
@inproceedings{feiyi2022aec,author={Chen, Feiyi and Zhang, Shuyang and Xie, Xupeng and Zhang, Qingwen and Wang, Yutong and Jiao, Jianhao and Liu, Ming},booktitle={IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)},title={Automatic Multi-camera Multi-LiDAR Extrinsic Calibration using Geometric Corners},year={2022},pages={4234-4240},organization={IEEE},}