Publications
Check the latest through Google Scholar; * means co-first authors
2026
-
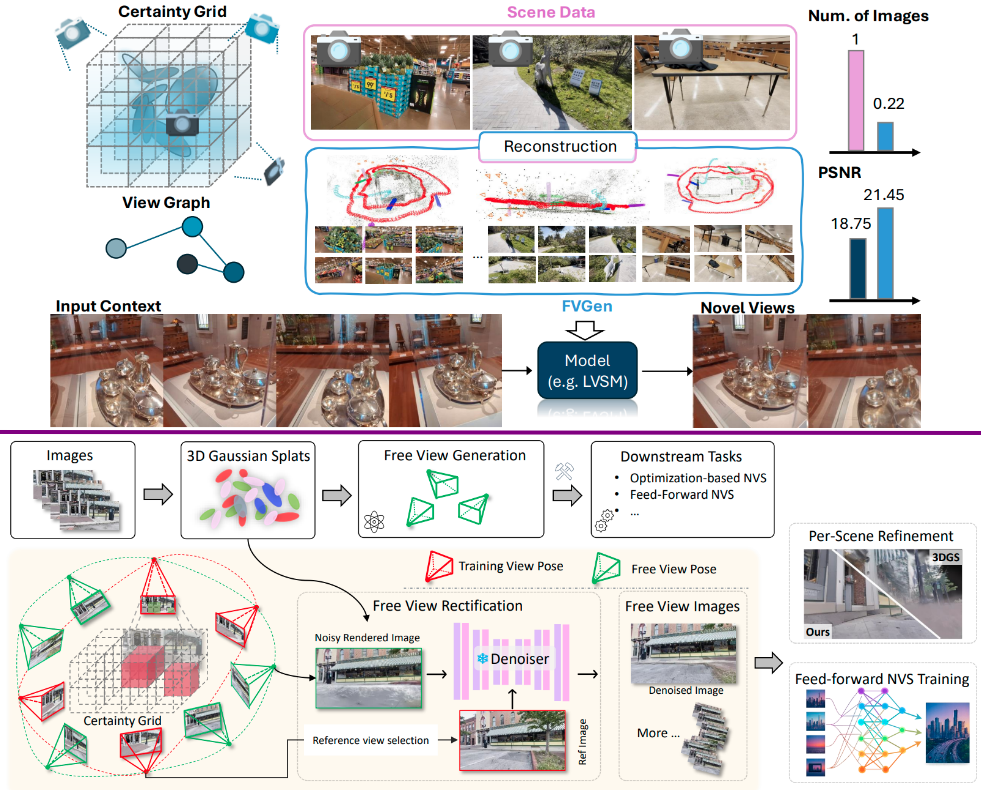 CVPR 2026FVGen: Scaling 3D Scene Datasets with Certainty-Aware Free-View Generation from Scene Geometry ReconstructionIn Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2026
CVPR 2026FVGen: Scaling 3D Scene Datasets with Certainty-Aware Free-View Generation from Scene Geometry ReconstructionIn Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2026





















